
近日,中科星驰参与的一项自动驾驶技术研究取得了新成果。该研究针对自动驾驶领域小目标检测精度低、目标遮挡和环境复杂度高的难题,提出了一种基于注意力机制和数据增强的点云3D目标检测方法,能够有效提高自动驾驶车辆对成像小目标的检测性能。
该研究成果已被智能交通领域国际顶级期刊《IEEE Transactions on Intelligent Transportation Systems》正式接收,并以“Early Access”的方式网络首发。中国科学院合肥物质科学研究院作为第一署名单位,中国科学技术大学硕士研究生李军儒作为论文第一作者并在中科星驰实习期间完成了这项研究,中国科学院合肥物质科学研究院研究员、中科星驰首席技术官王智灵为论文的通讯作者,硕士研究生龚殿城、王纯纯参与了相关工作。

论文主要内容
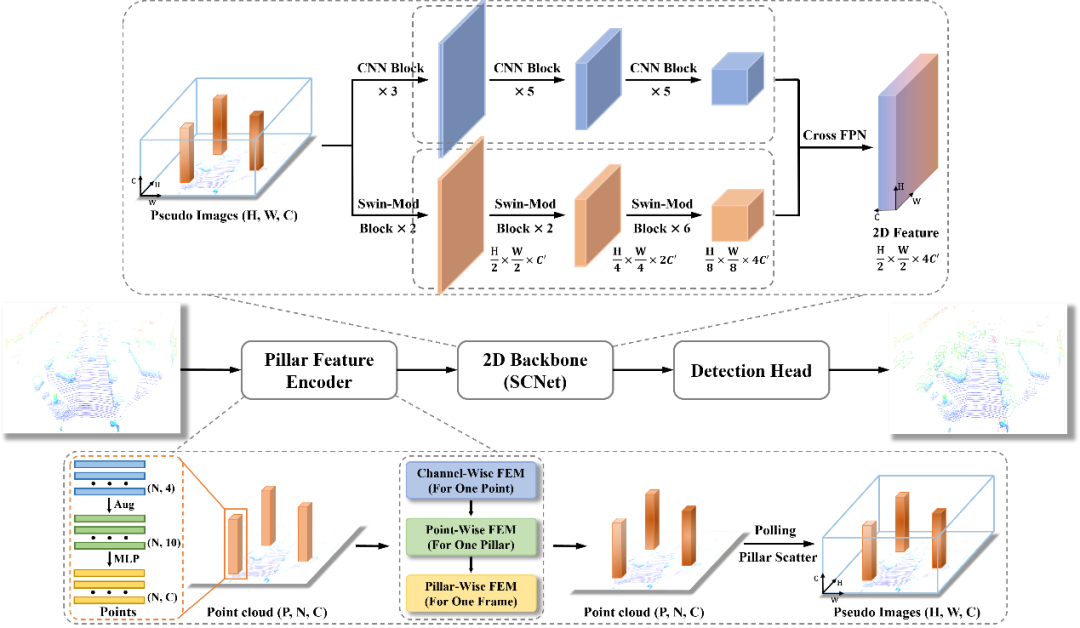
基于激光雷达点云的3D物体检测对于自动驾驶至关重要。为了从稀疏无序的点云数据中提取信息,通常将点云转换为伪图像,使数据紧凑有序。然而,这些方法在特征提取能力上有限,并且在转换过程中常常丢失关键信息,导致检测精度下降,对成像较小的目标物体的检测识别能力不足。
针对这些问题,研究团队提出了一种新的3D目标方法SCNet3D,该方法从特征和数据两个角度解决特征增强、信息保存和小目标检测的问题。首先,方法引入了一个特征增强模块(FEM),使用注意力机制在三维空间中对特征进行加权,并逐层从局部到全局增强3D特征。其次,设计了一个STMod-Convolution网络(SCNet),通过两个通道(一个用于基础特征,一个用于高级特征)实现了对BEV伪图像充分的特征提取和融合。此外,还通过一种具有形状和距离感知能力的数据增强方法(SDAA),在训练过程中向点云添加更多包含丰富信息的样本。对比实验验证了在目标成像小、干扰强的环境中该方法检测性能具有明显优势。
来源:中科星驰ShineAuto




